This company specializes in sustainable aquaculture, particularly focusing on farming fish. They aim to provide high-quality seafood while minimizing environmental impact through innovative farming practices.
Key Takeaways
Captured geo-referenced visual snapshots of anomalies in the fish farm’s nets, cages, mooring system, and seabed
Conducted a thorough inspection in just three hours without delays from strong currents
The Need for High Currents Comes with Trade-offs with Diver Inspections
This remote fish farm is strategically located in a high-current environment around a small island to promote fish health. However, these currents contribute to wear-and-tear and displacement of equipment, traditionally requiring commercial divers for inspections.
This approach had significant drawbacks. Strong currents made it difficult to obtain quality visual data. For safe operations, diving companies generally cease operations in currents as strong as 1 knot, limiting inspection windows, delaying project schedules, endangering divers’ safety, and impacting the quality of the visual data collected.
With this setback, the company needed a solution that would enable them to carry out inspections with increased efficiency and precision. It was in this challenge that they encountered BeeX.
BeeX reached out to the company, proposing the use of their Hovering Autonomous Underwater Vehicle. The company agreed to a trial, eager to test the vehicle’s capabilities in this application.
Uncovering Areas of Concern for the Farm
BeeX’s Hovering AUV, A.IKANBILIS, was tasked with visually inspecting the condition of the nets, cages, mooring systems, and seafloor at the fish farm.
The AUV was transported to the remote island fish farm on a small vessel and lowered into the water by hand.
Once deployed, A.IKANBILIS began its operations, effectively combating strong currents while providing a live feed via the Sambal User Interface. It first inspected the nets and cages, geo-referencing all inspected locations and capturing snapshots of anomalies, including broken frames and holes in the nets.
A Visual Snapshot of a Broken Cage Frame Obtained by A.IKANBILIS
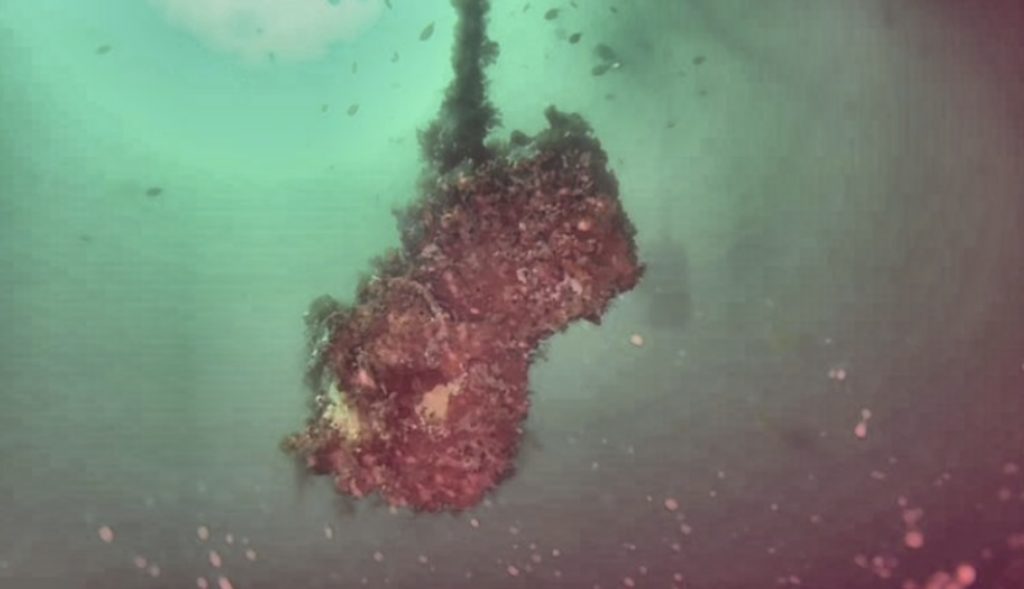
Next, A.IKANBILIS assessed the mooring system’s foundational stability, diving to deeper depths to obtain geo-referenced visual snapshots. It identified stray mooring ropes and irregular sinker blocks, which posed hazards by potentially allowing the farm to drift with the currents.
A Visual Snapshot of an Odd-Shaped Sinker Block Obtained by A.IKANBILIS
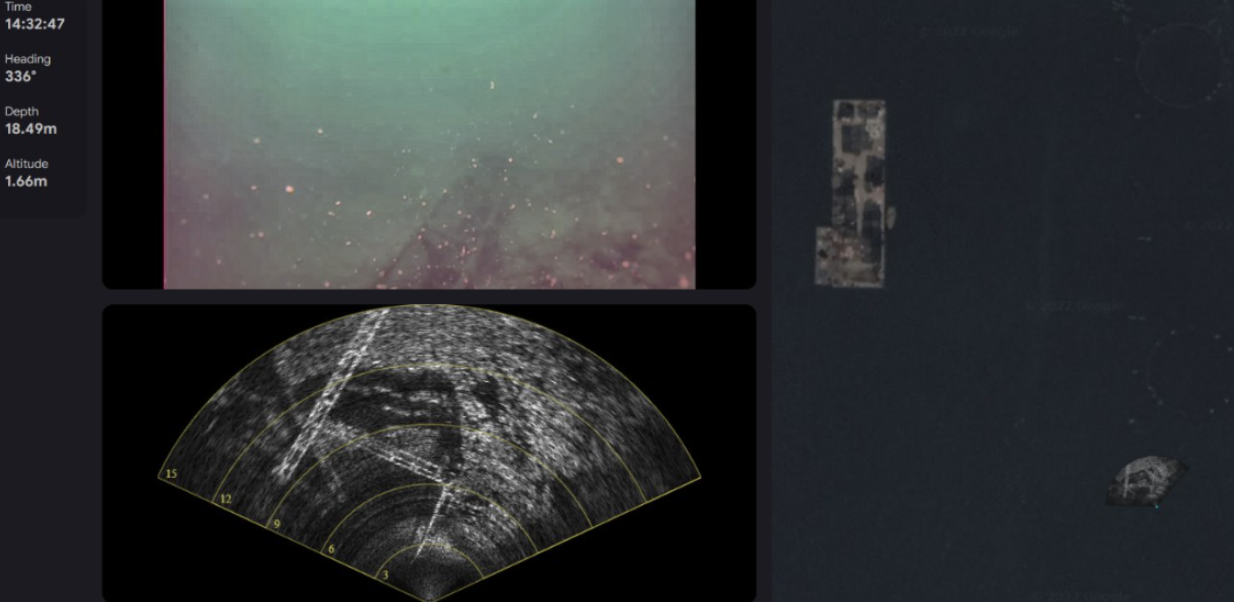
Finally, using its station-keeping capabilities, A.IKANBILIS hovered close to the seabed to capture clear visual data. It discovered a sediment bed mixed with gravel and sand and large truss-like structures on the seafloor.
Truss-like Structure on Seabed Visible on Sonar Reading and Visual View on Sambal Portal
After the three-hour deployment, data was immediately uploaded to Sambal Portal, BeeX’s cloud-based data reporting software, for the client’s review of acquired visual snapshots.
Unlocking Productivity Gains and Quality Data with Hovering AUV A.IKANBILIS
Compared to divers, the Hovering AUV collected more extensive and higher-quality data within the same timeframe. Geo-referenced snapshots of anomalies facilitate ease of subsequent maintenance and operational work.
BeeX’s A.IKANBILIS exemplifies how robotic innovation can enhance productivity and data quality in aquaculture inspections, offering significant value through advanced technology.