Ever wondered about the levels of autonomy present in underwater inspection vehicles? In this article, we aim to finally put this question to rest.
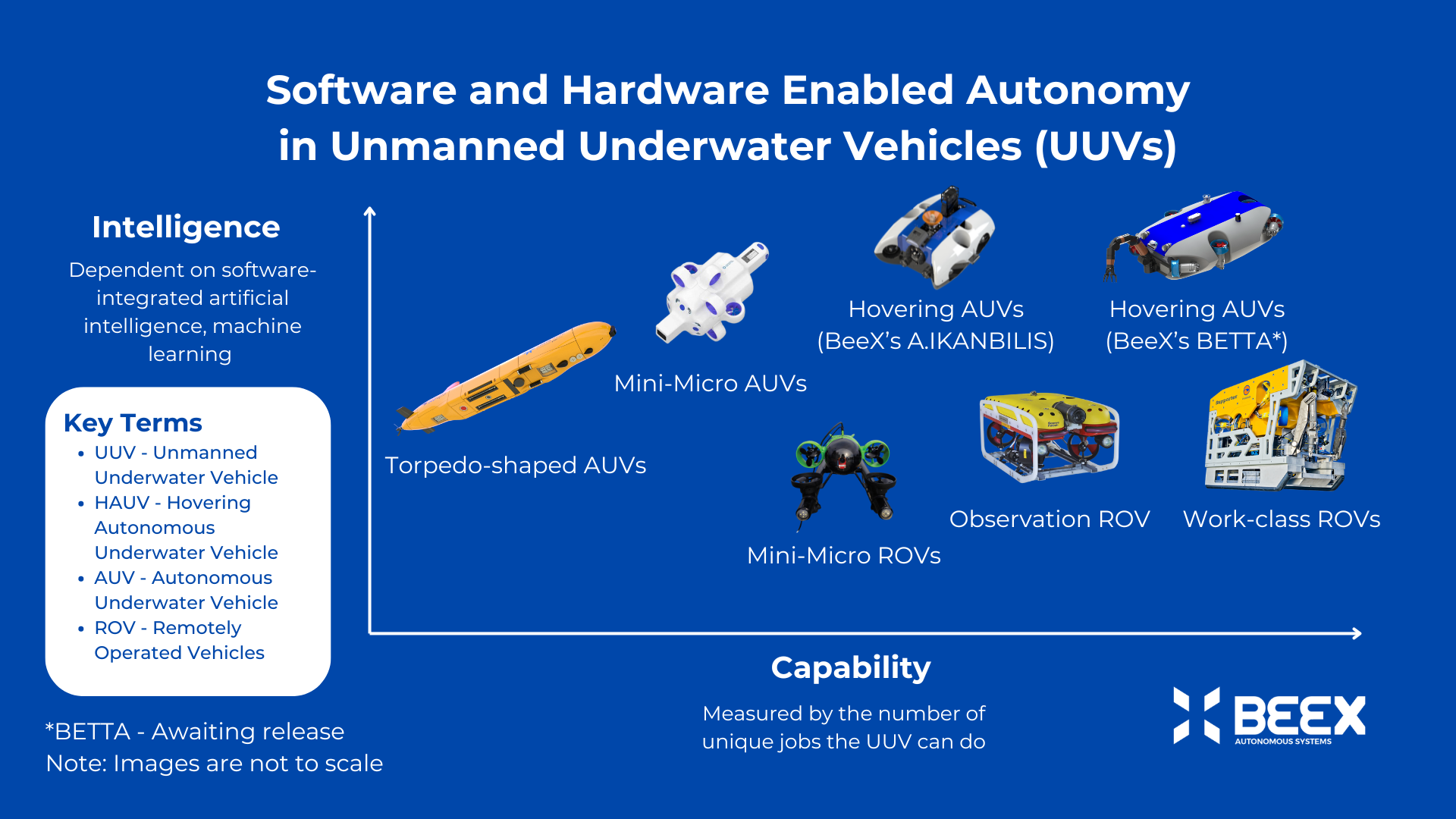
Levels of autonomy in an Unmanned Underwater Vehicle (UUV) are highly dependent on a vehicle’s design (i.e. hardware) and integrated intelligence (i.e. software) (See the chart below for a clear visualisation). There are five clear levels of autonomy reflected in the following four modes of operations: manual, automated, hybrid, and autonomous.
Autonomy of Unmanned Underwater Vehicles due to Innovation in Hardware and Software
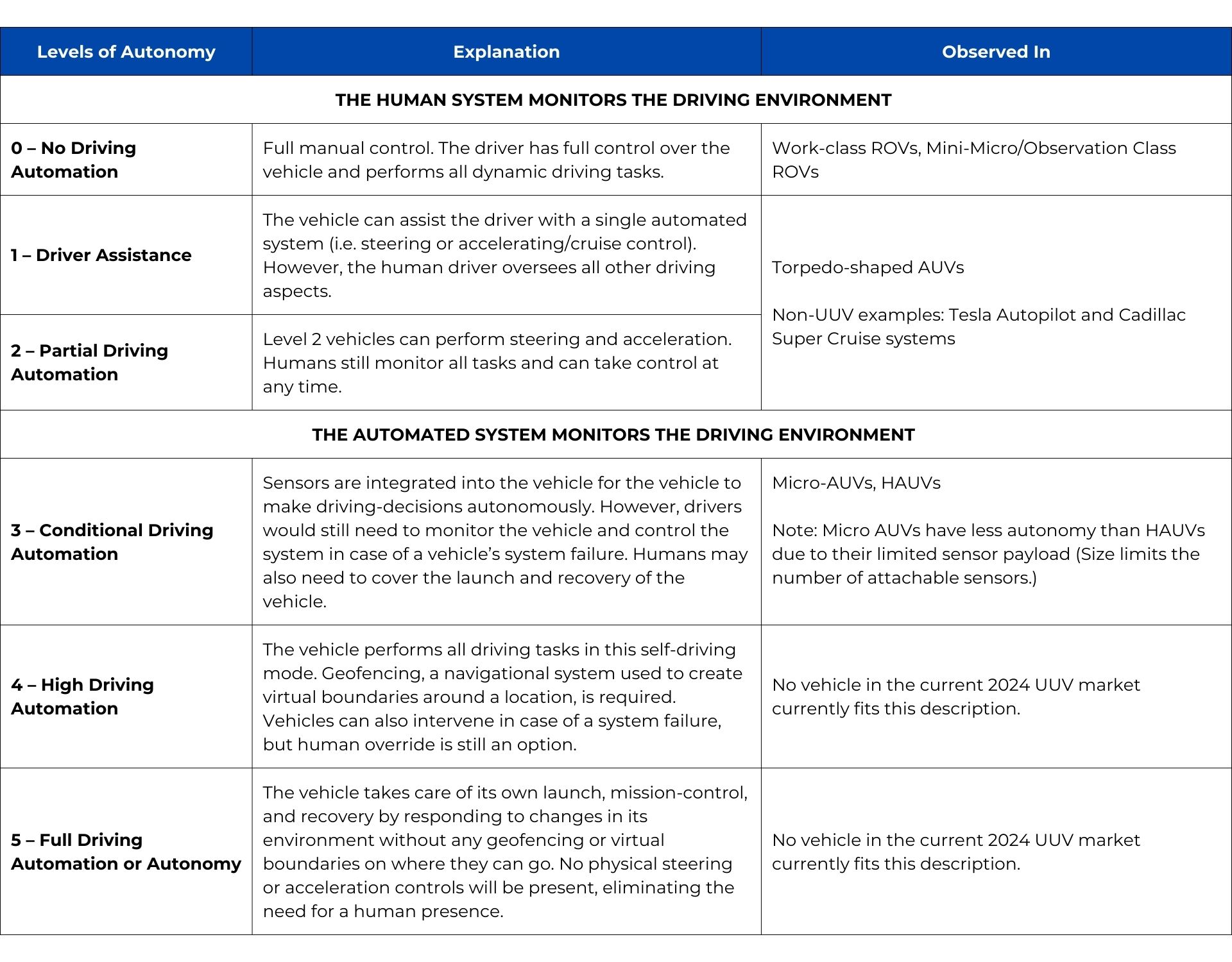
Autonomous driving relies on a mix of integrated sensors, actuators, complex algorithms, machine learning systems and processors to execute software. Let’s begin to unpack how different levels of autonomy directly influence a UUV’s mode of operations.For a quick summary, refer to the tablebelow.
Level 0: No Driving Automation in Manual Operations
Manual operations are commonly used by mini or work-class Remotely Operated Vehicles (ROVs). Through manual operations, ROVs depend on end-to-end human input to execute a task. For ROVs to be successfully manipulated, human operators need to observe their surroundings through the camera feed of ROVs for a vehicle’s safe navigation.
Analogy: Think of the end-to-end human execution required to operate a forklift to stack up crates in a warehouse. This requires full human attention and no driving automation.
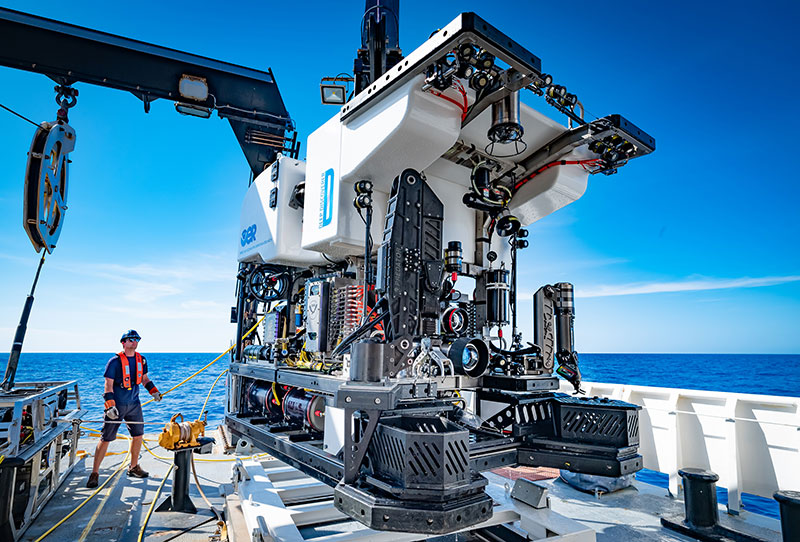
The remotely operated vehicle, Deep Discoverer, being recovered after completing 19 dives during the Windows to the Deep 2019 expedition. Image courtesy of Art Howard, Global Foundation for Ocean Exploration, Windows to the Deep 2019. Taken from NOAA.
Fun Fact: ROVs come in all shapes and sizes. Pictured above is a work-class ROV that is as big as a small truck, weighing around 1 ton!
Use Cases: Manual is best where precise control and immediate response to changing conditions are required (i.e. intricate survey tasks or data collection in complex environments, search and rescue, recovery of lost items, and inspection and maintenance of underwater infrastructure).
Controls: Operators use joysticks or software interfaces in control rooms in a surface vessel to guide ROVs, providing real-time input for navigation, maneuvering, and data collection.
“A BlueROV2 ready to be deployed and controlled by joystick with six degrees of freedom in NaviSuite Mobula ROV control and inspection software, which is running on the laptop”. Taken from Eiva.
“Inside the Control Room”. Taken from WHOI.
Limitations:Manual operations in a vehiclecan causea lack of consistency in data resultsas data qualityis dependent onits operator’s skill. In addition, training or hiring operatorstakes a significantnumberof resources (i.e. time and money).
Level 1-2: Driver Assistance and Partial Driving Automation in Automated Operations
Automated operations involve pre-programmed instructions and algorithms that enable an Autonomous Underwater Vehicle (AUV) or Hovering Autonomous Underwater Vehicle (HAUV) to perform specific tasks without constant human intervention. This enables human operators to minimally monitor the vehicle, as opposed to the full focus needed to control ROVs. In addition, operators do not need to be highly skilled to operate vehicles that accept automated commands.
Analogy: Robotic arms that are tasked to move items from one location to another can be considered as an automated operation.
Use Cases: Automated operations are suited for routine tasks, such as mapping a specific area, conducting surveys along predefined paths, or executing repetitive missions with minimal real-time human input.
Control: Using sensors and onboard systems, AUVs have a predetermined mission to execute and make decisions according to the environment they encounter.
Limitations: There is often little mission flexibility in an automated level of autonomy for most AUVs.
“MH 370 Search” Torpedo-Shaped AUV. Taken from Bateman Baypost AU.
Levels 3-4: Conditional Driving Autonomy and High Driving Autonomy in Hybrid Operations
Autonomous operations enable a vehicle to adapt to changes in a task or environment, with no human involvement for process execution unless in cases of system failure. Meanwhile, hybrid operations combine manual, automated, or autonomous controls, allowing flexible approaches to vehicle-use based on mission requirements.
Analogy: Think of a room-cleaning robot that will work in the condition of a flat room and designated areas of the flat room. This robot can take care of its own missions without the need for human guidance unless it is necessary to move the robot through a door.
Fun fact: BeeX’s A.IKANBILIS is a Level 3 HAUV that can operate in automated and autonomous operational modes. Operators can stop an autonomous operation when anomalies and foreign objects in structures are identified, then send multiple automated movement commands to guide the vehicle with more control.
BeeX Hovering Autonomous Underwater Vehicle at Deutsche Bucht North German Sea
Use Cases: These operations are ideal in situations where tasks are repetitive, and where human control is impractical. Examples of situations include long-endurance missions, deep-sea exploration, or scenarios with limited communication bandwidths.
Control: Using advanced algorithms, artificial intelligence, and machine learning, hybrid vehicles use sensors and adaptive control systems (i.e. sonar, optical, sensor fusion, inertia systems navigation, artificial intelligence and machine learning stack for real-time object detection and tracking, path planning) to interpret environmental data and make real-time decisions to fulfil mission parameters autonomously.
Limitations: Typically, flexibility over missions is limited as human operators cannot adjust or direct the movement of a vehicle while autonomous tasks are ongoing. However, processes can always be interrupted for manual control.
Levels 5: Full Driving Autonomy in Autonomous Operations
We have yet to see a UUV that can act in full autonomy without the need for a human to steer the vehicle, even in the case of a system failure. Most UUVs that have autonomous integrations must still be controlled by humans for launches and recoveries.
Analogy: Autonomous operations can be likened to mature human beings who can care for themselves and decide on their day-to-day missions to fulfill their goals for a day.
Use Cases: We posit that UUVs that are fully autonomous would be suited for tasks where 24/7 monitoring could be beneficial.
Control: No external steering controls for humans will be required. The vehicle will have its own integrated driving system.
Limitations: Vehicles will have to decide on courses of action in case of ethical dilemmas on their own. Costs to operate a Level 5 autonomous system may also be expensive due to the number of integrated sensors in the vehicle and supporting environmental infrastructures for their operations.
A Closer Look into A.IKANBILIS’ Integrated Autonomies
BeeX’s A.IKANBILIS uses hybrid operations, which is a mix of levels 2-3 partial driving automation and conditional driving automation.
Level 2 Partial Driving Automation Methods used by BeeX:
WASD – Similar to game controls, the WASD keys on a computer may be used to control the vehicle to move at a fixed preset distance in left, right, forward, and backward directions. Additional keys include Q for turning anti-clockwise, E for turning clockwise, the up arrow for going up toward the water surface, and the down arrow to move toward the seabed.
Waypoint – As the name suggests, a vehicle follows a flight path in a direct line to a specified coordinate on a map.
Auto and heading lock move – This is a type of waypoint method where a vehicle laterally follows path toward a specific point.
Lawnmower or “mow-the-lawn” method – This method describes an automated surveying technique by moving across a seafloor area with flight paths of straight lines and a conservative turning radius to avoid missing any regions of interest.
Encirclement – With this method, a vehicle follows a circular flight path around a specific target.
Level 3 Conditional Driving Automation Methods used by BeeX:
Pile autonomy – A vehicle conducts a 360-degree inspection of pile by flying down one side of a pile, encircling the pile halfway, and then flying back up to complete the inspection. The goal of this inspection is to look for pile defects and inspect accompanying anodes.
Ship hull autonomy – Using a lawnmower search pattern, the vehicle flies around a ship hull’s surface looking for foreign objects.
Monopile autonomy – Similar to techniques used for pile autonomy, the vehicle conducts a general visual inspection of the monopile from all directions, in addition to inspections of cathodic protection systems, impressed current cathodic protections, water exchange holes, and scours.
Altitude/depth control move – Sensing its distance from the seabed or following a water column, the vehicle drives itself to control its altitude (distance from the seabed) and depth (distance from the surface).
Collision avoidance – The vehicle moves around obstacles detected by sonar and other sensor integrations. (Disclaimer: This feature is still under development.)
At BeeX, we are excited for the release of BETTA, as this HAUV will allow for greater autonomy through a larger range of tasks and capabilities (i.e. spot cleaning and object manipulation).
Why Choose A.IKANBILIS?
To conclude, Unmanned Underwater Vehicles (UUVs) exhibit varying levels of autonomy, which offer different degrees of control and limitations. When selecting a UUV, key factors to consider include the vehicle’s data accuracy, range of capabilities, speed of data reporting, and deployment costs.
BeeX’s A.IKANBILIS offers distinct advantages for inspection missions:
Superior Data Quality: A.IKANBILIS leverages trained intelligence and multi-sensor integrations to ensure high data quality. Unlike torpedo-shaped Autonomous Underwater Vehicles (AUVs), which lack the ability to hover and conduct detailed inspections, A.IKANBILIS can stop and inspect infrastructure thoroughly. While Remotely Operated Vehicles (ROVs) allow for close inspections, the data quality is heavily reliant on the operator’s skill. A.IKANBILIS standardizes data quality through its advanced autonomy. Additionally, A.IKANBILIS integrates top-of-the-line sensors within its hardware and software, enabling it to document and map underwater infrastructure conditions accurately. This results in objective and consistent reporting.
Advanced Capabilities: A.IKANBILIS is ideal for underwater infrastructure inspections. It can create 2D sonar mosaic maps, 3D point cloud visualizations, and provide visual confirmations. Its capability to operate in currents up to 1.5 knots allows it to perform effectively even in harsh offshore environments.
Efficient Data Reporting: BeeX’s Sambal Portal, a cloud-based reporting software, summarizes the data collected by A.IKANBILIS in real-time. Clients can access and review the data remotely, eliminating the need to be physically present at the inspection site.
Cost Savings: A.IKANBILIS’s autonomous operation eliminates the need for trained operators, reducing training costs. Its size and design also negate the necessity for large support vessels required by many ROV systems for launch and recovery, further lowering operational expenses. The reduction in manpower and onsite operators translates into additional cost savings.
Interested in using A.IKANBILIS for your next inspection? Contact us at hello@beex.sg!