This client company, a Singaporean government agency. One of their development projects focused on land reclamation, a process vital for expanding landmass in sea environments. As this endeavor unfolded, BeeX’s inspection expertise was enlisted to test the productivity of autonomous underwater vehicles in improving the productivity of reclamation work.
KEY TAKEAWAYS
Conducted a full rock dump inspection within 90 minutes vs 2 full working days with incumbent diver-methods for the same scope!
Removed the need for extra engineers to check data validity due to objective sensor-based reporting
Produced a comprehensive geo-referenced 2D sonar mosaic in real-time
Enabled rock void identification, size estimation, and geo-positioning through coordinates through a 2D sonar mosaic
Accelerated rock dump inspection schedules by 14x
Challenges in Inspection Efficiency and Robustness with Human Divers
In land reclamation projects, rocks are deposited onto reclaimed slopes using a crane, and an even distribution of these rocks needs to be verified through inspections for foundational stability.
Traditionally, inspections of submerged sloping regions entail commercial divers swimming in a zig-zag fashion.
An Overview of the Rock Dump at the Land Reclamation Site
Nevertheless, the Company considered this approach inefficient, time-consuming, and unreliable. Due to divers’ inability to maintain a consistent swimming distance, they may overlook areas where rocks have potentially not been uniformly deposited. Additionally, video footage failed to adequately capture and map the site’s conditions, limiting its usefulness to the company and its contractors.
Explained by the Principal Engineer of the Company, “Quality of data is limited to visuals, but [this is] insufficient in Singapore waters. It becomes highly subjective, resulting in multiple sets of manpower checking the work.”
Hence, the Company’s Innovation Team wished to find solutions that would improve the productivity of their construction contractors.
This was where BeeX stepped in.
Leaving No Gaps Behind: A Systematic Lawnmower-Style Sonar Inspection
BeeX Team Carrying Hovering AUV A.IKANBILIS into the Water
Deployed at the land reclamation site, the BeeX team embarked on a systematic exploration aimed at mapping the rock dump area and conducting a meticulous void search. Through a trial inspection with Hovering AUV A.IKANBILIS, the team discerned that a 2D sonar mosaic map would best delineate voids between the rocks.
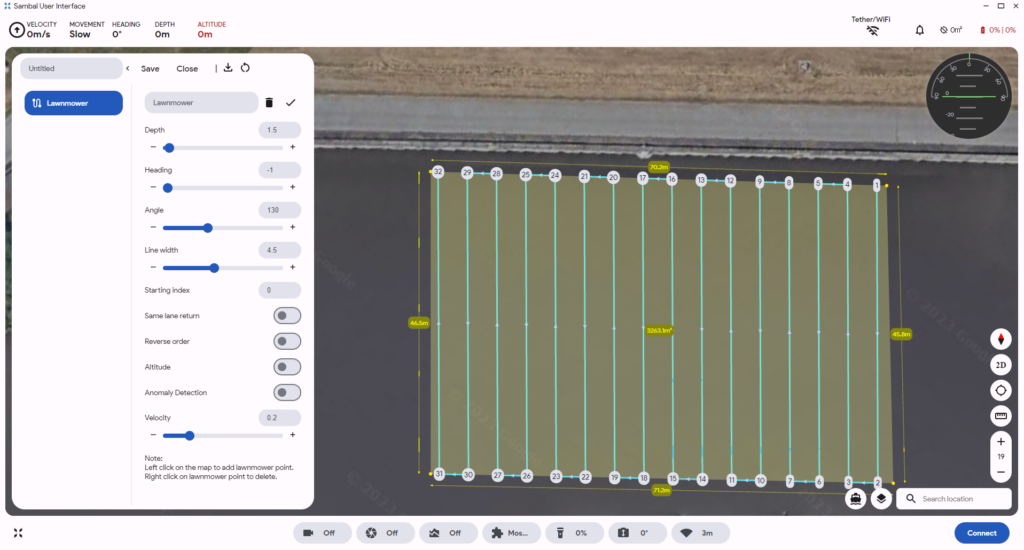
Following the trial, Hovering AUV (HAUV) A.IKANBILIS was equipped with a Power Sonar and Forward-Looking Sonar to produce higher resolution images. Then, the HAUV performed a thorough and automated lawnmower-style inspection, systematically maneuvering with a fixed turning radius.
Lawnmovwer Flight Path of A.IKANBILIS on Cloud Software Sambal User Interface
In a demonstration of efficiency, the HAUV simultaneously inspected an area spanning more than 2000 m² while generating a real-time 2D sonar mosaic site visualisation remotely viewed by site supervisors.
2D Sonar Mosaic Showing Sparse Rock Arrangement (Left) to Tight Rock Arrangement (Right)
Clear-cut, Spectacular Results Pushing the Frontier in Mission Productivity
All this was completed within a concise period of less than 90 minutes, beating commercial diving solutions that would take 2 days to fully inspect the same area.
The technology was a clear leap in innovation; at the end of the job, a full 2D sonar geo-referenced mosaic of the rock distributions was in the hands of the Company and their contractors.
The Bright Future of Convenient and Effective Underwater Data Acquisition
BeeX’s comprehensive 2D sonar mosaic of the rock distribution would assist informed decision-making on the company’s land reclamation efforts.
Using BeeX’s data reporting software Sambal Portal’s built-in zooming, measurement, and geo-referencing functions, the mosaic map would be instrumental in identifying site voids and providing estimated void sizes and geolocations for backfilling works.
In conclusion, BeeX’s no-diver approach provided undeniable value to the rock dump inspection, promising reduced costs, time, and workforce requirements for future deployments. This approach addresses evolving demands of underwater inspection, and BeeX stands as a key partner in this endeavour.